robot end effector ppt
RF Based Pick And Place Robotic Arm - A pick and place robot with a end effector to grip and place objects in your desired locationcontrolled by RF communication. ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 1.
Introduction To Robotics Ppt Download
End effectors are used by robots to interact with the environment.
. The crane is used to position the terminal device. An end effector is the device that is at the end of a robotic arm. End-Effectors In the robotic world it is generally understood that the end of the wrist is the end of the robot.
Everybody has a different idea of what constitutes a robot. End effectors are. Strength Its ability to withstand the forces associated with the operation of the end effector.
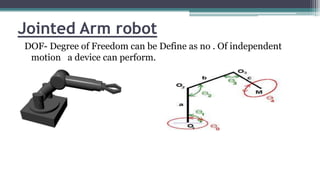
Of robot max 6 mobile robot on plane can reach position described by 3 dof but if robot has fewer dof. Any object attached to the robot flange wrist that serves a function. Physical construction of parts within finger.
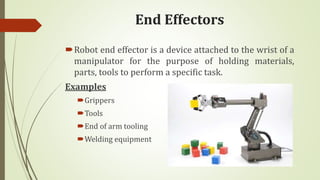
Device that attaches to the wrist of the robot arm and enables the general- purpose robot to perform a specific task. Personal care and hygiene Work or school related activities Lifting and manipulating objects Body support for. Robotics Timeline 1922 Czech author Karel Capek wrote a story.
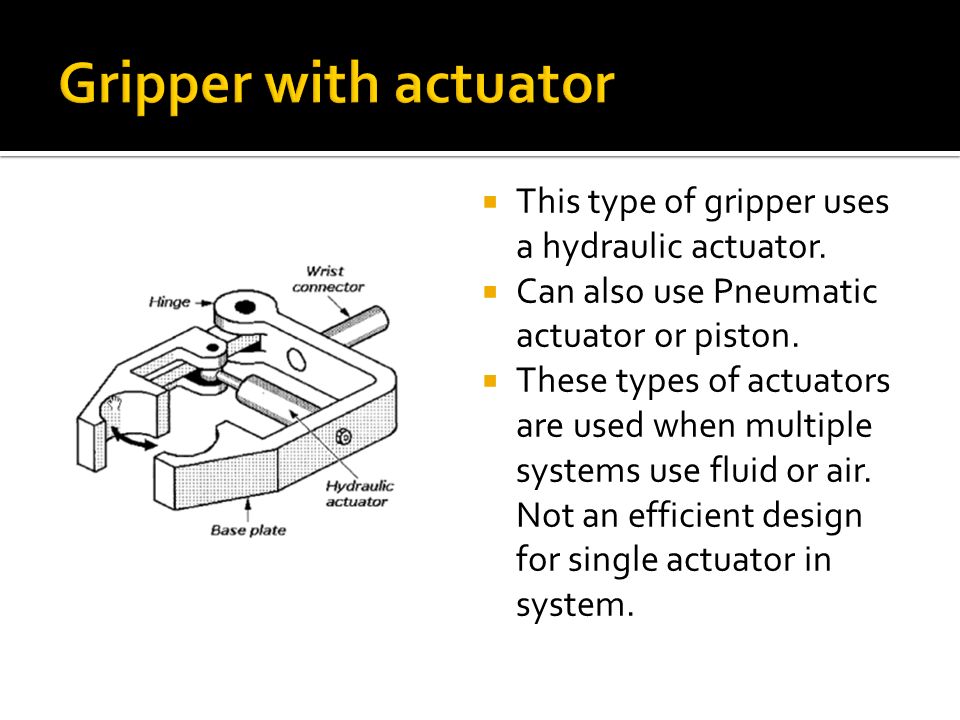
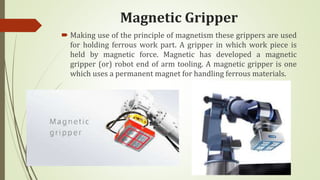
Robot End Effector - Robot End Effector Biological Sample Handling at -80 C Mike Patrie James Way Carley Holt Serg Arabasky Ming Chaio Chiang Biomech PowerPoint PPT presentation free to view. Four Major Types of gripper 1Mechanical 2Suction or vaccum cups 3Magnetised gripper 4Adhesives. Its refers to the wrist sockets ability to yield elastically when subjected to a force.
Aside from the robot itself the most critical device in a robotic automation system is the end effector. The end effector also known as end-of-arm tooling sits at the end of the robot arm and moves only when a human operator activates it through the associated software. The end effector is the part that reacts to stimuli and interacts with the environment.
End-effectors Any machinery equipment devices external auxiliary axes or sensors supporting the robot performing its task. Even though a human hand is very versatile an end effector has one great advantage that humans do not have and that is the interchangeability of end effectors. The end effector is the part of the robot that interacts with the environment.
Robot end-effectors are also. They vary according to the task given to the robot. Then it cannot do it directly it is non-holonomic three wheels that both steer and drive strategies.
Statically stable control eg. PowerPoint PPT presentation free to view. Robotic gripper Robotic collision sensors.
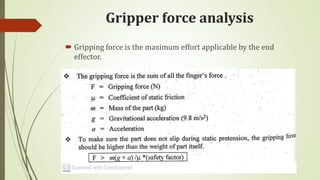
Pick and place robot has many advantages and it uses in military medical and defense applications. The robot has the capability of moving to various positions within the limits of its work envelope. Be able to compute the load.
A Robot End effector is a mechanical part attached to the end of the robot arm hardware that is intended for direct interaction of environment and adjacent. End effectors can be part of the robots integral design or added-on to the base robot. Mechanical Gripper 8 It is an end effector that uses mechanical fingers actuated by a mechanism to grasp an object.
A robotic end effector is the device that is mounted onto the end of a robot arm. Industrial robot cell. There are two main types of end effectors.
Appropriate end effector for. Ambler keep 3 legs on ground at all. Two ways of constraining part in gripper 1.
One or more robot systems including associated machinery and equipment and the associated safeguarded space and protective measures. 4 What relevance to us. Laws of Robotics 8 Asimov proposed three Laws of Robotics Law 1.
Name from robota forced labour. A robot must protect its own existence as long. Definitions Slide covers more definitions.
A robot may not injure a human being or through inaction allow a human being to come to harm. A robot must obey orders given to it by human beings except where such orders would conflict with the first law. It performs the tasks that are performed by palm and fingers of human hand Sensors Sensors are used to gather information from the surroundings.
10182015 C 2001 Ernest L. Designs for end effectors are as numerous as the applications employing robots. End effector is any object attached to the robot flange wrist that serves as a function.
Synonyms of end effector are end of arm tooling or EOAT robot peripherals or robot accessories although these last two terms are not as precise and can include devices that are not necessarily installed and the end of the robot arm. End Effector End effector is gripper or end-arm tooling attached to the wrist of manipulator to accomplish the desired task. Robots as Humanoids We will be studying Industrial manipulator type Robots.
Simulations of robots used to test real robots. End effector A robotic end-effector is any object attached to the robot flange wrist that serves a function. Robotics once remarked I cant define a robot but I know one when I see one Many different machines called robots.
Grippers and tools We can think of an end effector like a human hand. For fixed robot dof. ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 1.
Agenda Introduction to Robotics Classification of Robots Robot accessories Robot coordinates Work volumes and Reference Frames Robot Programming Robot Applications in Lean Mfg. Hall University of Cincinnati 5. Automotive Industry Accounted for the Largest Share of the Robot End Effector Market throughout 2021-2026 - Due to traditional heavy-duty robot.
Avatars behave like robots. Its ability to withstand the forces associated with the operation of the end effector. The structure of an end effector and the nature of the programming and hardware that drives it depend on the task the robot will be performing.
Activities performed by the prostheses. If camera is present Visual representation of the surroundings can be seen. End effector is a generic term that includes all the devices that can be intalled at a robot wrist.
The end effector is the correct name for the attachment that can be mounted to a bolting plate fitted to the wrist. Basic grasping end effector forms are referred to as grippers. The purpose of this mechanical part is subject to the robots application in the world.
In robotics an end effector is a device or tool thats connected to the end of a robot arm where the hand would be. VR models use robotic principles. In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment.
In the case of a serial manipulator the robot end effector usually lies in the hardwares last link. The terminal device end effector performs the function of the hand. Of end effector is determined by dof.
Introduction to Robotics A common view. Compliance Its refers to the wrist sockets ability to yield elastically when. In effect it is opposite of rigidity.
Pick Place Robot Ppt

Mechanical Grippers In Robots Deals 56 Off Www Propellermadrid Com
Mechanical Grippers In Robots Deals 56 Off Www Propellermadrid Com
End Effectors
Pick Place Robot Ppt
Pick Place Robot Ppt
Industrial Automation And Robotics Ppt Video Online Download
Pick Place Robot Ppt
Robotics Unit 2 End Effector
Robotics Unit 2 End Effector

Robotics Unit 2 End Effector
End Effectors

Mechanical Grippers In Robots Deals 56 Off Www Propellermadrid Com

Ppt Format

Mechanical Grippers In Robots Deals 56 Off Www Propellermadrid Com
Pick Place Robot Ppt
Ppt 710 088 Robot Vision Messen Aus Bildern 2vo 1ku Matthias Ruther Powerpoint Presentation Id 5046874
Robotics Unit 2 End Effector
Pick Place Robot Ppt